




Use Cases

Vulnerable Road User SafetyCustomers use the analysis of pedestrian near-miss collisions, movements, behaviors, and frequency when crossing the street and crosswalk to target signal phase and timing infrastructure improvements.
|

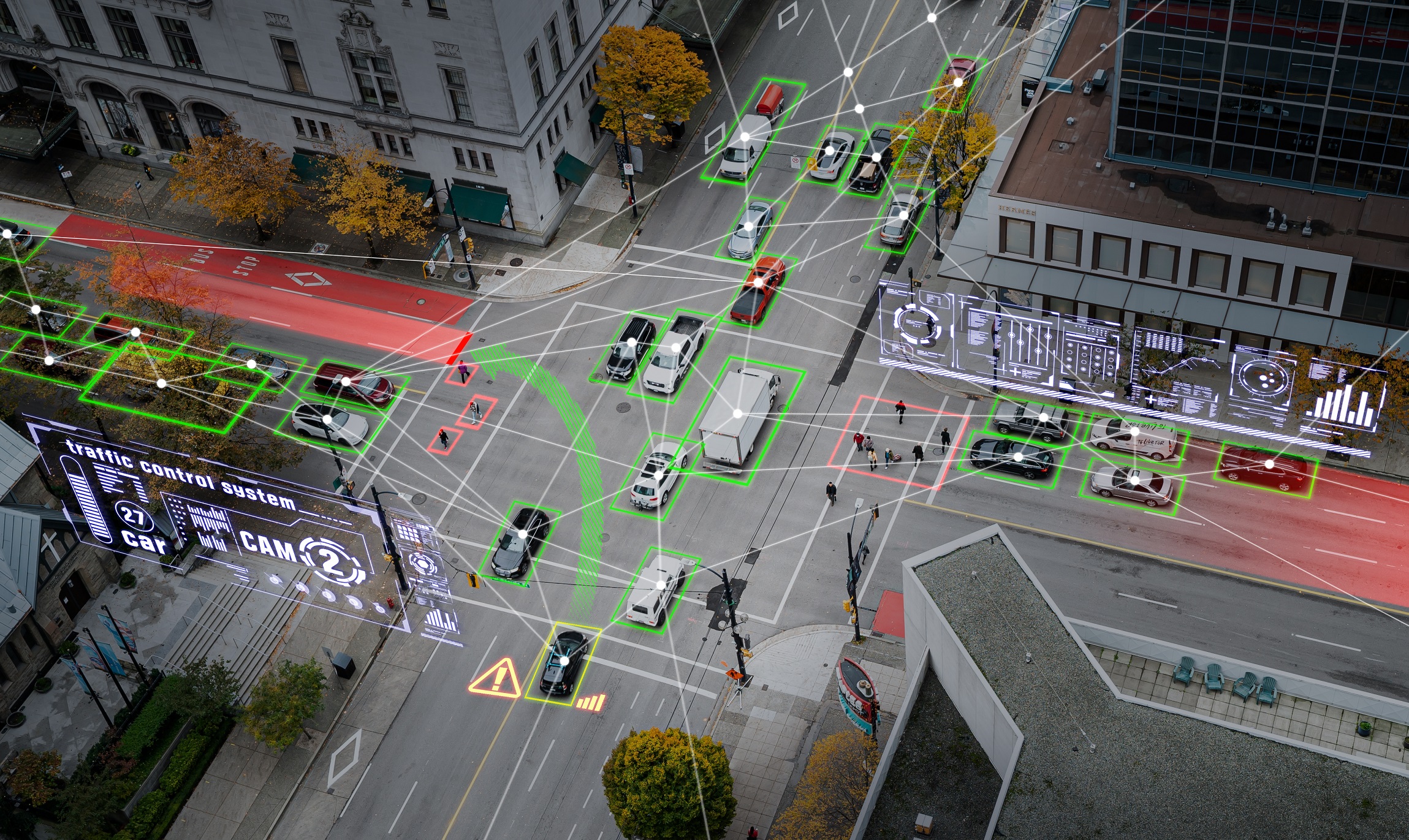
Traffic MonitoringTraffic data is collected to improve public safety for mobility applications, design safer roads, foster better decision-making for autonomous vehicles, and prepare for the future of intelligent transportation system applications.
|

Behaviour MonitoringSensaVision is able to detect near-miss collisions with 95% accuracy in multiple deployment areas at the intersection, beyond the intersection, mid-block, 24/7.
|

CO2 MonitoringIntegrate into connected and autonomous vehicles (CAVs) through Cellular Vehicle-to-Everything (C-V2X) communications.
|
And More
Shape Divider - Style triangle_asymmetrical
Customers
|
|

|
|
|
|
|
|
|
Shape Divider - Style triangle_asymmetrical
What Our Clients Have To Say!

|
Sensagrate provides a unique dataset ahead of the market, advancing safer and smarter streets. We assessed thirteen computer vision traffic solutions around the world. We selected Sensagrate because they have an end-to-end solution encompassing everything we need to advance our solution and provide the data and analytics cities seek. |
Shape Divider - Style triangle_asymmetrical
Case Study

Shape Divider - Style triangle_asymmetrical







